WHAT IS CU HYPERLOOP?
While not an entirely new idea, there has been some excitement about Elon Musk’s hyperloop in recent years; the basic idea is to propel a pod through a vacuum tunnel for rapid transportation. The hyperloop vision is to transport people between any two points in the US in 30 minutes or less. The biggest obstacle in the way of making hyperloop a reality is digging enough tunnels.
CU Hyperloop was chosen out of over 400 applicants as one of 6 teams to participate in a competition hosted by The Boring Company with the goal of designing and manufacturing a tunnel boring machine (TBM) which must dig a tunnel of 30m at a nominal depth of 1.5m.
THE PROPULSION TEAM
As a member of the propulsion team, Mateo was tasked with getting the TBM to move into and through the ground. For the 2023 competition year, teams were challenged to dig at the pace of a snail.

RENDERING OF TBM

The propulsion system operates in three sections; the front grippers, the hexapod, and the rear grippers. The hexapod expands and contracts and the grippers press plates into the walls of the tunnel to provide a frictional force.

RENDERING OF HEXAPOD
THE PROPULSION CONCEPT

DIAGRAM USED FOR HAND CALCULATIONS ANALYZING NECESSARY FORCES FROM EACH PROPULSION COMPONENT
The system works on a hand and foot design; to dig forwards, the back grippers activate, holding the back of the TBM in place; then the hexapod expands, pushing the front of the TBM forwards to dig more tunnel. Once fully extended (with a new section of tunnel excavated), the back grippers release and the front grippers activate, holding the front of the TBM in place; then the hexapod contracts, pulling the back of the TBM forwards. This process repeats for the length of the tunnel.
RENDERING OF FRONT GRIPPER - TOP VIEW

ITERATION + ANALYSIS
One of the main tasks assigned on this project was to consider failure modes and adjust designs to avoid them. This happened in two ways; qualitatively analyzing problems to consider unforeseen failure modes, and quantitatively performing FEA on different components using ANSYS to ensure that they would not reach expected failure modes.
EXAMPLE OF COMPONENT ITERATION AFTER QUALITATIVE ANALYSIS
The images above show an example of a design change made after considering a possible failure mode; ambient soil pressure underground might push soil into the gap created between the gripper and the rest of the TBM shell, allowing soil to fall into the internal mechanisms. The soil plates were added to the gripper design on the right to prevent soil from getting in.





FEA OF FRONT GRIPPER PADS; DEFORMATION (NTS)
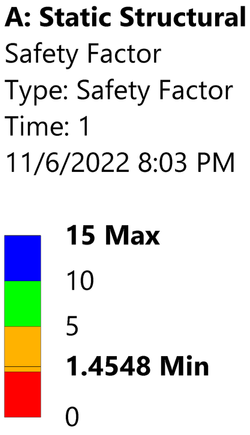
FEA OF FRONT GRIPPER PADS; SAFETY FACTOR
After many months of hard work designing, manufacturing, and integrating, the team has returned home from the ‘Not a Boring Competition’ put on by Elon Musk’s The boring Company near Austin Texas in March 2023, where they took home the accuracy award; CU Hyperloop was one of 3 teams worldwide to take home an award of any kind.
Manufacturing




WHERE ARE WE NOW?


Competition


In the span of 20 minutes, the team went from discovering that the cutting teeth we ordered would not be coming, to improvising a solution using spare materials which passed safety/analysis checks. (Outer teeth pictured above)

